Science
Researchers Harness Indian Dance to Advance Robotic Hand Learning
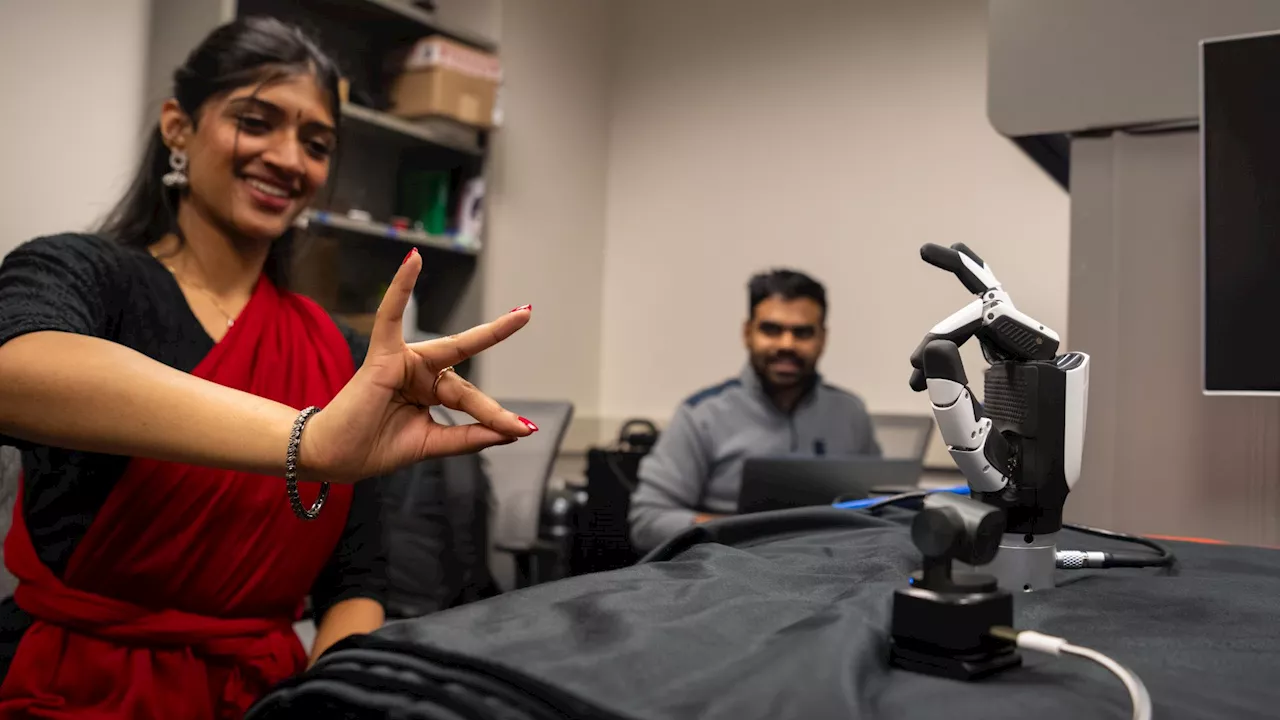
A recent study from the University of Maryland, Baltimore County (UMBC) has uncovered valuable insights into robotic hand movement learning by examining traditional Indian classical dance, specifically the hand gestures known as Bharatanatyam mudras. The research indicates that these ancient dance forms encode intricate movement patterns that could enhance how robotic systems learn to control hand motions and improve rehabilitation techniques for fine motor skills.
The study builds on the concept of kinematic synergies, which refer to coordinated patterns of joint movement that assist the brain in simplifying complex actions. These synergies function like an alphabet. By combining them, a diverse range of hand gestures can be created. Lead researcher Ramana Vinjamuri has dedicated over a decade to understanding the brain’s management of detailed hand control.
To begin, Vinjamuri’s team analyzed thirty natural hand grasps, ranging from holding small beads to lifting large bottles. They identified six key synergies that encompassed nearly all variations in these movements. Subsequently, they applied the same methodology to study thirty Bharatanatyam mudras, discovering a similar number of synergies but with significantly greater flexibility.
To evaluate the differences between the two sets of synergies, the researchers reconstructed fifteen letters of the American Sign Language (ASL) alphabet. The mudra-derived system outperformed the natural grasp alphabet, producing gestures with enhanced accuracy.
Vinjamuri’s interest in dance as a subject of study stemmed from observing older dancers. “We noticed dancers tend to age super gracefully: They remain flexible and agile because they have been training,” he explained. This observation prompted the team to explore whether these refined movements could provide a more advanced framework for robotic motion.
“Through dance, we are not just examining healthy movement but what Vinjamuri refers to as super healthy movement. These traditional gestures may offer what he describes as a superhuman alphabet,” he added. Initially, Vinjamuri sought a universal system to reconstruct all movements. However, after extensive research, he concluded that while a perfect system may not exist, the mudra-based alphabet presents superior dexterity and flexibility compared to the conventional grasp alphabet.
The implications of this study extend beyond robotics. The research team is now applying their findings to the development of robotic systems. Instead of programming robots to imitate specific gestures, they are teaching machines to amalgamate these fundamental movement alphabets to create new hand shapes. They are currently testing this approach on both a robotic hand and a humanoid robot, each requiring different translation methods from mathematical modeling to practical movement.
Additionally, the lab has developed a low-cost system that utilizes cameras and software for recording and analyzing gestures. Vinjamuri believes this technology could facilitate accessible physical therapy tools that help guide patients through rehabilitation exercises at home.
Curiosity remains a driving force behind this research. “Once I learned about synergies, I became eager to see if we could use them to enable a robotic hand to respond and perform like a human hand,” said Parthan Olikkal, a Ph.D. researcher involved in the project. “Integrating my work into the research efforts and observing the outcomes has been immensely gratifying.”
The study has been published in the journal Scientific Reports, showcasing a promising intersection of technology and traditional art forms that could redefine robotic learning and rehabilitation techniques.
Ohio Teacher Arrested on Child Seduction Charges – Urgent Update

Lorain County Leaders Seek New Opportunities for Midway Mall

Producer Responds to Blake Lively’s Allegations Over Birth Video

Measles Vaccination Rates Climb Back to 95% in Chicago Schools

Chicago High Schools Unite for 4th Annual Toy Drive Trolley

Former Student Finds Closure in $17.5M Settlement with CPS

Researchers Harness Indian Dance to Advance Robotic Hand Learning
J.J. McCarthy Ready to Start After Concussion Protocol Cleared
Immigrant Welcome Center Adapts to Urgent Policy Changes

Ohio State Study Uncovers Brain Connectivity and Function Links

Hamas Chief Stresses Disarmament Tied to Occupation’s End

University of Hawaiʻi Joins $25.6M AI Project for Disaster Monitoring

Megan Thee Stallion Exposes Alleged Online Attack by Bots

Researchers Challenge 200-Year-Old Physics Principle with Atomic Engines

Paloma Elsesser Shines at LA Event with Iconic Slicked-Back Bun

ALMA Discovers Companion Orbiting Giant Star π 1 Gruis

FDA Unveils Plan to Cut Drug Prices and Boost Biosimilars

Beloved Artist and Community Leader Gloria Rosencrants Passes Away
-
 Science1 month ago
Science1 month agoOhio State Study Uncovers Brain Connectivity and Function Links
-
 Politics1 month ago
Politics1 month agoHamas Chief Stresses Disarmament Tied to Occupation’s End
-
Science1 month ago
University of Hawaiʻi Joins $25.6M AI Project for Disaster Monitoring
-
 Entertainment1 month ago
Entertainment1 month agoMegan Thee Stallion Exposes Alleged Online Attack by Bots
-
 Science2 months ago
Science2 months agoResearchers Challenge 200-Year-Old Physics Principle with Atomic Engines
-
 Entertainment1 month ago
Entertainment1 month agoPaloma Elsesser Shines at LA Event with Iconic Slicked-Back Bun
-
 Science3 weeks ago
Science3 weeks agoALMA Discovers Companion Orbiting Giant Star π 1 Gruis
-
 World1 month ago
World1 month agoFDA Unveils Plan to Cut Drug Prices and Boost Biosimilars
-
 Entertainment1 month ago
Entertainment1 month agoBeloved Artist and Community Leader Gloria Rosencrants Passes Away
-

 Top Stories1 month ago
Top Stories1 month agoFederal Agents Detain Driver in Addison; Protests Erupt Immediately
-

 Business1 month ago
Business1 month agoMotley Fool Wealth Management Reduces Medtronic Holdings by 14.7%
-

 Politics2 months ago
Politics2 months agoNHP Foundation Secures Land for 158 Affordable Apartments in Denver